
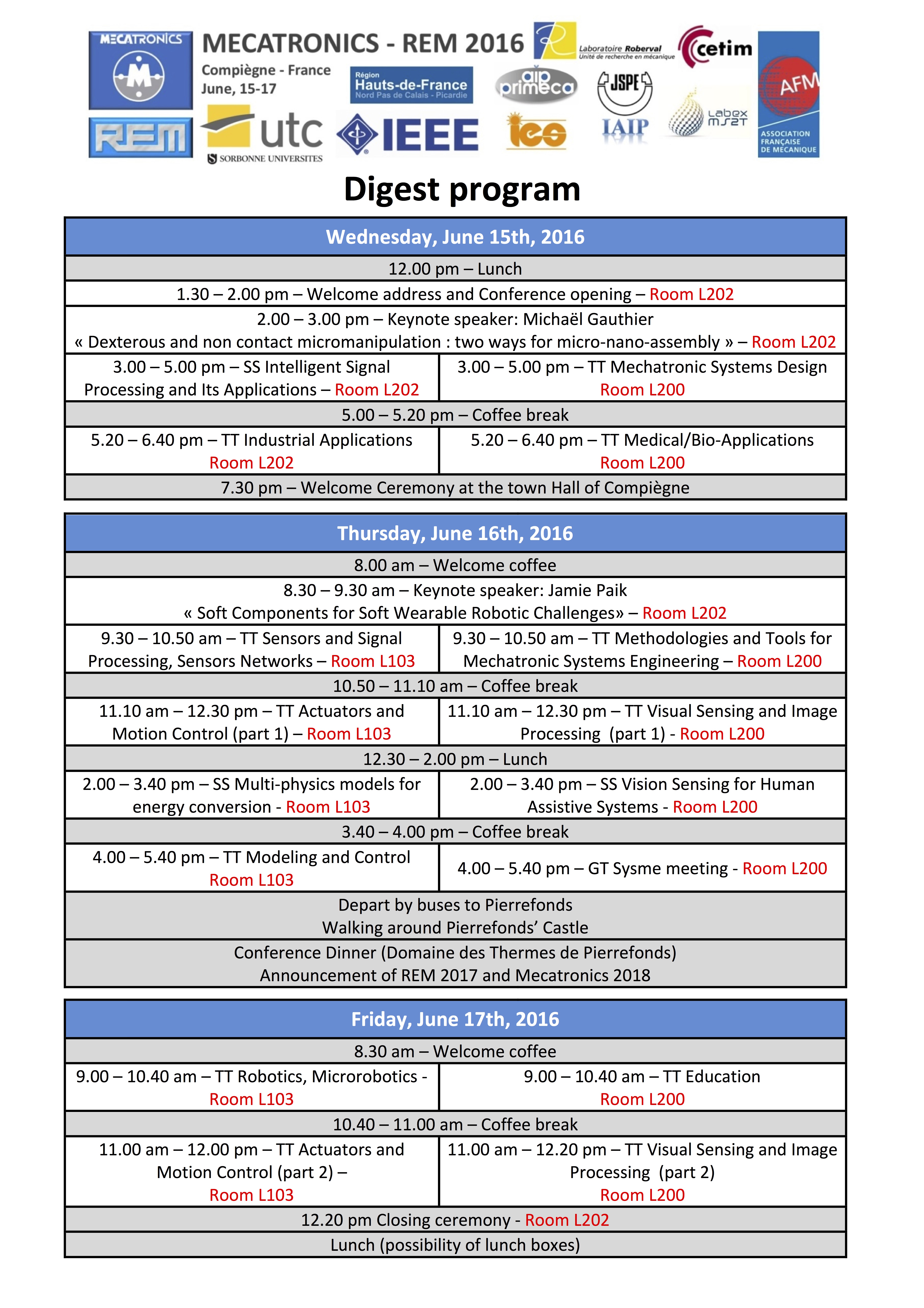
Program
Detailled program of the MECATRONICS – REM 2016 conference
Keynote speaker:
Jamie Paik – Professor
Ecole Polytechnique Federale de Lausanne (EPFL)

« Soft Components for Soft Wearable Robotic Challenges »
Abstract:
The latest interests in wearable technologies require softer components to improve the machine human interface. The interface design primarily requires robust solutions in realizing versatile and adaptable interface on soft and multi-degrees of freedom (DoF) working surface. This talk will discuss my lab’s research efforts and progresses in soft sensors, soft actuators and soft integration solutions for wearable soft robotics applications.
Bio:
Prof. Jamie Paik is Director of Reconfigurable Robotics Lab of Swiss Federal Institute of Technology (EPFL) and a member of Swiss NCCR robotics group. The Reconfigurable Robotics Laboratory (RRL) leverages expertise in multi-material fabrication and smart material actuation for novel robot designs. At Harvard University’s Microrobotics Laboratory, she started developing unconventional robots that push the physical limits of material and mechanisms. Her latest research effort is in soft robotics including self-morphing Robogami (robotic origami) that transforms its planar shape to 2D or 3D by folding in predefined patterns and sequences, just like the paper art, origami.
Michaël Gauthier – CNRS Senior Scientist
Head of the Automation and Micromechatronics (AS2M) department in FEMTO-ST institute, Besançon, France

« Dexterous and non-contact micromanipulation: two ways for micro-nano-assembly »
Abstract:
This paper presents an overview of recent activities of FEMTO-ST institute in the field of micro-nanomanipulation. Current proof of concept of robotic micromanipulations are currently limited by the number of degree of freedom addressed and also are very limited by their throughput. Two ways can be considered to improve both the velocity and the degrees of freedom: non-contact manipulation and dexterous micromanipulation. Indeed in both ways movement including rotation and translation are done locally and are only limited by the micro-nano-objects inertia which is very low. It consequently enable to generate 6DOF and to induce high dynamics. The presentation will highlight recent works which have shown that controlled trajectories in non-contact manipulation enable to manipulate micro-objects in high speed. Dexterous manipulation on a 4 fingers microtweezers have been also experimented and show that in-hand micromanipulations are possible in micro-nanoscale based on original finger trajectory planning. The future perspectives regarding markets and future scientific challenges of robotic micro-nanohandling will also be addressed.
Bio:
Michaël Gauthier, CNRS senior scientist (eq. full professor), is the head of the Automation and Micromechatronics (AS2M) department in FEMTO-ST institute, Besançon, France. AS2M is one of the largest European research group working in the field of micro-nanorobotics. M. Gauthier works in the field of micro-nanorobotics since 2000 and has proposed, modeled and experimented new robotics tools for microhandling and micro-assembly in several European and National projects. He is the author of 2 books, and of more than 35 papers and 55 conference talks. He is also one of the co-founder of the start-up ‘Percipio Robotics’ providing micro-assembly platforms for industrial applications since 2011. He recently receives the ‘CNRS Bronze Medal’ (10% top researcher in national research center CNRS) for these works on robotic manipulation in liquid. Now, he is focusing his personal activities on micro-nano-robots based on non-contact forces and dexterous microgrippers.